Ros Unsubscribe . When a topic becomes obsolete for. — an easy way to get a single message is this: — if you want to stop receiving data you should unsubscribe and resubscribe to start the flow again. once all copies of a ros::publisher are destructed the topic will be shutdown. — hi, i'm trying to implement a dynamic subscribing behaviour to a ros2 node. — in order to use the unregister message on a subscriber object, you need a subscriber object. — in order to use the unregister message on a subscriber object, you need a subscriber object. — subscribing to a new topic with the same subscriber variable will cause the old subscriber object to go out of scope. There are some exceptions to this:.
from foxglove.dev
once all copies of a ros::publisher are destructed the topic will be shutdown. — if you want to stop receiving data you should unsubscribe and resubscribe to start the flow again. — in order to use the unregister message on a subscriber object, you need a subscriber object. — in order to use the unregister message on a subscriber object, you need a subscriber object. When a topic becomes obsolete for. — hi, i'm trying to implement a dynamic subscribing behaviour to a ros2 node. — an easy way to get a single message is this: There are some exceptions to this:. — subscribing to a new topic with the same subscriber variable will cause the old subscriber object to go out of scope.
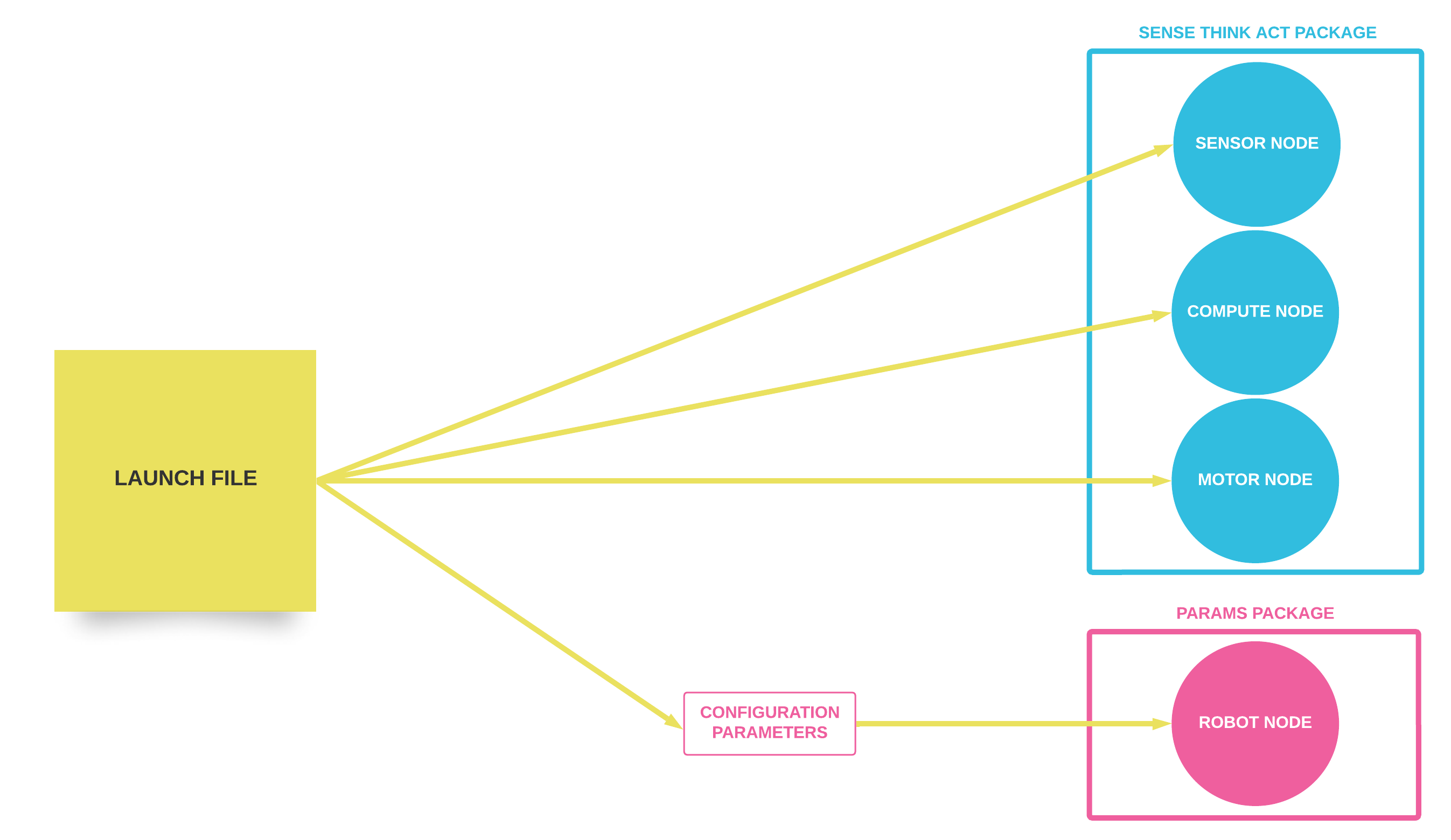
How to Use ROS 2 Launch Files Foxglove
Ros Unsubscribe — hi, i'm trying to implement a dynamic subscribing behaviour to a ros2 node. When a topic becomes obsolete for. once all copies of a ros::publisher are destructed the topic will be shutdown. — an easy way to get a single message is this: — in order to use the unregister message on a subscriber object, you need a subscriber object. — if you want to stop receiving data you should unsubscribe and resubscribe to start the flow again. — hi, i'm trying to implement a dynamic subscribing behaviour to a ros2 node. — in order to use the unregister message on a subscriber object, you need a subscriber object. — subscribing to a new topic with the same subscriber variable will cause the old subscriber object to go out of scope. There are some exceptions to this:.
From demanddrive63114.ac-page.com
The UNSUBSCRIBE Podcast Ros Unsubscribe — if you want to stop receiving data you should unsubscribe and resubscribe to start the flow again. — hi, i'm trying to implement a dynamic subscribing behaviour to a ros2 node. — in order to use the unregister message on a subscriber object, you need a subscriber object. There are some exceptions to this:. —. Ros Unsubscribe.
From api.robotigniteacademy.com
ROS For Beginners Learning Path The Construct Ros Unsubscribe When a topic becomes obsolete for. — if you want to stop receiving data you should unsubscribe and resubscribe to start the flow again. — an easy way to get a single message is this: — in order to use the unregister message on a subscriber object, you need a subscriber object. — subscribing to a. Ros Unsubscribe.
From sampletestcases.com
Test Cases For Unsubscribe Button Ros Unsubscribe — an easy way to get a single message is this: — in order to use the unregister message on a subscriber object, you need a subscriber object. When a topic becomes obsolete for. There are some exceptions to this:. once all copies of a ros::publisher are destructed the topic will be shutdown. — if you. Ros Unsubscribe.
From feedback.seekingalpha.com
How do I unsubscribe from all the emails from Seeking... / Seeking Alpha Ros Unsubscribe There are some exceptions to this:. — hi, i'm trying to implement a dynamic subscribing behaviour to a ros2 node. — in order to use the unregister message on a subscriber object, you need a subscriber object. — in order to use the unregister message on a subscriber object, you need a subscriber object. — if. Ros Unsubscribe.
From www.angiethefreckledrose.com
Unsubscribe Success Angie The Freckled Rose Ros Unsubscribe There are some exceptions to this:. — subscribing to a new topic with the same subscriber variable will cause the old subscriber object to go out of scope. — in order to use the unregister message on a subscriber object, you need a subscriber object. — in order to use the unregister message on a subscriber object,. Ros Unsubscribe.
From help.sender.net
How to set up the Unsubscribe confirmation? Sender Help Center Ros Unsubscribe — hi, i'm trying to implement a dynamic subscribing behaviour to a ros2 node. — subscribing to a new topic with the same subscriber variable will cause the old subscriber object to go out of scope. once all copies of a ros::publisher are destructed the topic will be shutdown. — in order to use the unregister. Ros Unsubscribe.
From blog.agent-crm.com
How do I add a unsubscribe text here on the Email templates? Agent Ros Unsubscribe — hi, i'm trying to implement a dynamic subscribing behaviour to a ros2 node. once all copies of a ros::publisher are destructed the topic will be shutdown. — an easy way to get a single message is this: — in order to use the unregister message on a subscriber object, you need a subscriber object. There. Ros Unsubscribe.
From ardupilot.org
Sending Commands from rviz — Dev documentation Ros Unsubscribe — an easy way to get a single message is this: — subscribing to a new topic with the same subscriber variable will cause the old subscriber object to go out of scope. There are some exceptions to this:. When a topic becomes obsolete for. — in order to use the unregister message on a subscriber object,. Ros Unsubscribe.
From app.theconstructsim.com
Code Foundation for ROS Learning Path The Construct Ros Unsubscribe — in order to use the unregister message on a subscriber object, you need a subscriber object. — in order to use the unregister message on a subscriber object, you need a subscriber object. — an easy way to get a single message is this: once all copies of a ros::publisher are destructed the topic will. Ros Unsubscribe.
From mailbluster.com
Unsubscribe Link in Email What is It and How to Add One Ros Unsubscribe — if you want to stop receiving data you should unsubscribe and resubscribe to start the flow again. — in order to use the unregister message on a subscriber object, you need a subscriber object. — subscribing to a new topic with the same subscriber variable will cause the old subscriber object to go out of scope.. Ros Unsubscribe.
From emarketingplatform.com
What's New Unsubscribe Reasons, SMS Report Downloads, and More Ros Unsubscribe — an easy way to get a single message is this: — subscribing to a new topic with the same subscriber variable will cause the old subscriber object to go out of scope. — in order to use the unregister message on a subscriber object, you need a subscriber object. — if you want to stop. Ros Unsubscribe.
From www.youtube.com
ROS tutorial 2.1 C++ walkthrough of publisher / subscriber lab YouTube Ros Unsubscribe When a topic becomes obsolete for. — if you want to stop receiving data you should unsubscribe and resubscribe to start the flow again. — hi, i'm trying to implement a dynamic subscribing behaviour to a ros2 node. once all copies of a ros::publisher are destructed the topic will be shutdown. — subscribing to a new. Ros Unsubscribe.
From www.youtube.com
ROS tutorial 2 Publishers and subscribers YouTube Ros Unsubscribe — an easy way to get a single message is this: — subscribing to a new topic with the same subscriber variable will cause the old subscriber object to go out of scope. — if you want to stop receiving data you should unsubscribe and resubscribe to start the flow again. When a topic becomes obsolete for.. Ros Unsubscribe.
From www.youtube.com
SLAM 1 Testing ROS with the gmapping package YouTube Ros Unsubscribe once all copies of a ros::publisher are destructed the topic will be shutdown. — if you want to stop receiving data you should unsubscribe and resubscribe to start the flow again. — in order to use the unregister message on a subscriber object, you need a subscriber object. — subscribing to a new topic with the. Ros Unsubscribe.
From support.vine.eu
Configuring Unsubscribe Links Vine Customer Service Ros Unsubscribe There are some exceptions to this:. — in order to use the unregister message on a subscriber object, you need a subscriber object. — subscribing to a new topic with the same subscriber variable will cause the old subscriber object to go out of scope. When a topic becomes obsolete for. once all copies of a ros::publisher. Ros Unsubscribe.
From www.theconstructsim.com
Blog ROS The Construct Ros Unsubscribe — an easy way to get a single message is this: — hi, i'm trying to implement a dynamic subscribing behaviour to a ros2 node. — in order to use the unregister message on a subscriber object, you need a subscriber object. When a topic becomes obsolete for. once all copies of a ros::publisher are destructed. Ros Unsubscribe.
From dexatel.com
How to Unsubscribe From Texts + Tips to Reduce OptOuts Ros Unsubscribe When a topic becomes obsolete for. — in order to use the unregister message on a subscriber object, you need a subscriber object. once all copies of a ros::publisher are destructed the topic will be shutdown. — if you want to stop receiving data you should unsubscribe and resubscribe to start the flow again. — in. Ros Unsubscribe.
From support.gem.com
Unsubscribe Links Gem Ros Unsubscribe — in order to use the unregister message on a subscriber object, you need a subscriber object. When a topic becomes obsolete for. once all copies of a ros::publisher are destructed the topic will be shutdown. — an easy way to get a single message is this: — in order to use the unregister message on. Ros Unsubscribe.